|
|


08 luty 2012
 |

|

|

|






|
|
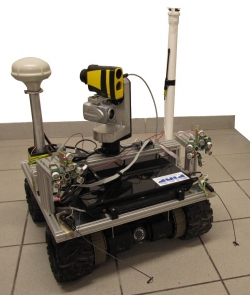
Robot zwiadowczo-inspekcyjny został wyposażony w czujniki i kamery, dzięki którym zostanie wyposażony w zmysły potrzebne przy penetracji i przygotowywaniu map miejsc niedostępnych dla człowieka. Dzięki nowym zmysłom robot "wyczuje" przeszkody i niebezpieczne nachylenia terenu, a następnie przygotuje mapę eksplorowanych przestrzeni. Projekt zrealizowano we współpracy z Przemysłowym Instytutem Automatyki i Pomiarów.
Podstawową wersję robota, który może być wykorzystywany w policji i wojsku do działań saperskich lub antyterrorystycznych, studentom kierunku Automatyka i Robotyka na Politechnice Warszawskiej dostarczył Państwowy Instytut Automatyki i Pomiarów.
- To był taki typowy mały robot zwiadowczy, rozpoznawczy. Służył do lekkich prac pomocnicznych: mógł podjechać w jakieś niebezpieczne miejsce, podnieść paczkę, przekręcić ją, pozwolić na obejrzenie jej z pewnej odległości przez operatora - mówi doktorant PW Maciej Stefańczyk. Wyjaśnia, że studenci starali się odciążyć operatora od najbardziej żmudnej części jego pracy, czyli dojazdu robotem do celu, gdyż w niektóre miejsca nie można podejść bardzo blisko, więc operator musiał dojechać robotem czasem kilkadziesiąt czy kilkaset metrów.
Zadaniem systemu opracowanego przez studentów było przeprowadzenie robota bez pomocy operatora do miejsca, w którym miał on dokonać jakiejś inspekcji. Dlatego wyposażyli go w zestaw czujników. Robot - jak opisuje Stefańczyk - zyskał więc "oczy", czyli dwa rodzaje kamer: tradycyjną - dla użytku operatora oraz taką, która pomagała określić odległość do celu. Dodane przez studentów "uszy" - czyli ustawione w różnych kierunkach czujniki ultradźwiękowe - umożliwiają wykrywanie i omijanie przeszkód.
- Kolejny był zmysł równowagi, czyli czujnik przechyłowy, którzy mierzy przechylenie robota we wszystkich płaszczyznach i służy do wykrywania niebezpiecznych przechyłów w czasie jazdy. Ta grupa czujników przyda się w sytuacji, gdy robot będzie zjeżdżał z jakiejś skarpy czy krawężnika. Wtedy zatrzyma się i do operatora będzie należała decyzja, co zrobić dalej. Robot może wtedy kontynuować samodzielną jazdę, albo pod kontrolą operatora podjechać do bezpiecznego terenu - wyjaśnia Stefańczyk.
Orientacja i ułożenie robota odczytywane będą z kolei za pomocą odbiornika GPS i kompasu, który wykryje kierunek, w którym robot się porusza. Zmysł dotyku, zapewnią zaś robotowi czujniki przypominające małe wąsy, które do pewnego momentu będą poddawały się naciskowi.
- W momencie, kiedy nacisk będzie zbyt duży czujniki zareagują i robot się zatrzyma. Gdy będzie przejeżdżał przez np. wyższą trawę i nacisk nie będzie zbyt silny to robot pojedzie dalej - powiedział rozmówca PAP.
Systemy elektroniczne i opracowane przez studentów algorytmy spowodują, że robot mógłby prowadzić inspekcję terenów bez ingerencji operatora. Może być wysyłany w miejsca skażone i bardzo niebezpieczne, gdzie życie człowieka byłoby zbytnio zagrożone. Dzięki zamontowanym kamerom, na monitorze można zobaczyć m.in. jak wygląda sytuacja w zagrożonych pomieszczeniach, gdzie znajdują się niebezpieczne przedmioty oraz poszkodowane osoby.

| REKLAMA |
|
|

| REKLAMA |
|
|
| REKLAMA |
|
|









