strona główna  Aktualności Wystawa najnowocześniejszych robotów na międzynarodowej konferencji IROS 2011
Aktualności Wystawa najnowocześniejszych robotów na międzynarodowej konferencji IROS 2011
|
|


13 październik 2011
 |

|

|

|






|
|
Ponad 50 najnowocześniejszych robotów i 790 prezentacji dotyczących problemów robotyki przedstawiono na międzynarodowej konferencji IROS2011 w San Francisco w USA – poinformował magazyn „New Scientist”.
Zespół naukowców pod kierownictwem prof. Kevina Petersona z University of California w Berkeley (USA) zaprezentował latającego robota BOLT (Bipedal Ornithopter for Locomotion Transitioning). Jest to pierwszy robot w pełni wykorzystujący mechanikę poruszania się ptaków – projekt opracował dr Ken Dial z University of Montana, który badał, w jaki sposób ptaki posługują się jednocześnie skrzydłami i nogami, pokonując drzewa.
Do lotu robot używa skrzydeł przedstawianych w płaszczyźnie poziomej i pionowej jednocześnie, podobnie jak ważki. Na ziemi porusza się na cienkich członowatych nogach, podobnie jak karaluch, pomagając sobie jednak skrzydłami, zwłaszcza jeśli ma chodzić po stromych lub prawie pionowych powierzchniach.
Jak powiedział „New Scientist” prof. Petersom, robot jest bardziej uniwersalny od wcześniejszych, posiadających wyłącznie skrzydła czy członkonogi, przy czym jest porównywalny w szybkości działania zarówno z robotami poruszającymi się, jak i z latającymi. BOLT jest jednak łatwiejszy w sterowaniu i łatwiej może się wspinać. Robot tego typu może służyć jako eksploracyjny, rozpoznawczy i monitorujący, np. linie wysokiego napięcia.
Z reguły przy kontakcie z robotami jesteśmy pouczeni, aby dla własnego bezpieczeństwa i uniknięcia zakłóceń autonomicznego zachowania robotów trzymać się od nich z daleka.
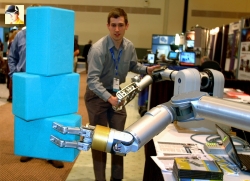
Ze względu na nieprzewidywalną naturę interakcji kontakt z ludźmi wymaga sprzężenie wysokiej jakości detekcji i sterowania. Demonstracja Josepha Romano Katherine Kuchenbecker z University of Pennsylvania prezentuje tę funkcję w różnych zachowaniach interaktywnych, takich jak "high five", uściski czy przekazanie obiektu między człowiekiem i robotem PR2. Dzięki wykrywaniu przez czujniki wielu sygnałów i śledzeniu ruchu ludzi możliwe jest reagowanie w naturalny i skoordynowany sposób.
Z kolei Dario Floreano i Sabine Hauert, naukowcy z szwajcarskiego Instytutu Technologii EPFL w Lozannie, przedstawili w San Francisco system pozwalający łączyć się małym autonomicznym robotom jeden rój. Takie łączenie pozwala grupie robotów na zwiększenie zasięgu działania i komunikacji.
Kiedy latające roboty muszą krążyć w ciasnych rundach i komunikować się na dystansie setek metrów, wówczas formują spójny rój, krążący nad celem. Kiedy polecenie krążenia zostaje wycofane, rój z powrotem rozdziela się na pojedyncze, autonomiczne małe roboty latające. Jeśli jednak zostanie wydane następne polecenie krążenia, wówczas odległość komunikacji nie jest już tak duża i roboty nie formują roju, lecz kilka powiązanych ze sobą grup.
System ten zostanie prawdopodobnie wykorzystany w przyszłych latających robotach ratowniczych i poszukiwawczych oraz wojskowych wykonujących zadania SAR (search&rescue), związane z poszukiwaniem zaginionych żołnierzy, marynarzy lub lotników.
Natomiast zespół pod kierownictwem Alexandra Boxerbauma, doktoranta z Case Western Reserve University w Cleveland (stan Ohio, USA) przedstawił robota wzorowanego na mechanice ruchu dżdżownicy. Podobnie jak ona, składa się on z pierścieni, wytwarzających pulsujący ruch posuwisty od jednego końca urządzenia do drugiego. W momencie rozprężenia pierścieni robot ma kontakt z podłożem, co pozwala na poruszanie się.
Boxerbaum zaprezentował obecnie drugi prototyp tego urządzenia, który porusza się bardziej wydajnie i nie potrzebuje dla ruchu tak silnego przylegania do podłoża, jak poprzednia wersja. Naukowiec chce zminiaturyzować robota, tak aby był on użyteczny w badaniach medycznych, np. jako głowica endoskopu czy innego instrumentu wykonującego badania inwazyjne.
Źródło: New Scientist, PAP

| REKLAMA |
|
|

| REKLAMA |
|
|
| REKLAMA |
|
|









