strona główna  ARTYKUŁY Elektronika Complex tracking circuit design (Rozbudowany układ śledzenia obiektów)
ARTYKUŁY Elektronika Complex tracking circuit design (Rozbudowany układ śledzenia obiektów)
|
|
 |

|

|

|






|
|
The wireless market continues to evolve at an ever growing pace. Increased consumer demand for smart phones, together with the widespread adoption of new form factor devices such as tablet PCs, is providing a dynamic landscape. Application stores, together with new, feature-rich mobile devices and enhanced network capabilities, are delivering new business models and compelling user experiences for consumers [1].
Wireless navigation is also a good example of intuitive product development. Turn it on and it tells you where you are. Put in the destination and it tells you how to get there. In our opinion presented project, called CTCD, is probably most complete and affordable GPS unit available today. Our proposition combines GPS monitoring with GPRS transmission to tracking application.
This tracker provides tracking, reporting and monitoring, capable of updates every friction of seconds. Our unit works worldwide with both GPRS/SMS standards. In this paper we present the most compatible working modes to present vast possibilities of this project.
Popular solution for this kind of device is to combine GSM or GPRS module with GPS chip and Intel 8051 compatible microcontroller [2]. There are also modules providing both of these technologies – GPS/GPRS+GPS. One of the biggest problems with those solutions are: poor support from developers side, too simple software applications and slow working databases. Those features should enable using this device by many users and giving them feedback information online. Main advantage of this kind of construction is that only a few implementations of on-market GSM modules are using it to its full potential.
Another challenge is to construct device small, energy-saving and stand-alone, which can work very long on one fully-loaded battery cell. Therefore, when hardware device is used only as standalone sender, some functions, like headphones or LCD display, are disabled. If device is powered from battery, it is recommended to turn them off, or just avoid installing them on device if it’s not necessary to use them.
CTCD device is designed around GSM/GPRS+GPS module and simple microcontroller. First two modules are connected with microcontroller via USART interface. It is recommended to use separate serial transition ports integrated into microcontroller for GSM/GPRS and GPS parts, if both are used in the same time (for example, if AGPS is active).
Simultaneous using many devices on one USART will produce errors. The baud rate supported by tested device is between 4800 and 115200 bps. All data are transmitted in unsigned char type. Data buffer is also used.
Beside USART interface, GSM turn_on and status pins are also connected to and controlled by microcontroller. GPS might be also operated by microcontroller, if necessity occurs.
Device requires two separate power sources. Main one is mandatory to turn device on. Maintenance power allows to save ephemerides and data in memory, also to keep real time clock synchronized with satellites, when modules are switched off. It can be provided by alkaline button cell battery or high capacity capacitor.
First step is to measure position. GPS part receives signals from satellites and saves ephemerides in memory [3]. Meantime, The Real Time Clock is also being synchronized. In the future, there might be possibility to connect with any other global navigation positioning system, like ГЛОНАСС (GLONASS), 北斗 (Beidou) or Galileo, or even with all of these systems via all-in-one solution [4]. Unfortunately, currently only GPS is fully operational.
For some purposes, like tracking packages, it is enough to check position only once per two hours. Taking less measurements expands operating time of single data upload. Its because overdue ephemerides and Real Time Clock desynchronized in compassion with satellites. Hot start could be impossible and all data from each satellite would have to be downloaded once again, before object gets localized. In presented solution, passive antennas are used, because of their low power consumption.
After reading measurements, GPS starts to work in sleep mode. It operates in low power consumption state. GPS part is waken-up after configurable propagation time (no longer than two hours). During sleep mode, chipset is turned off and no data is transmitted from device. Only RT C keeping voltage is needed to keep clock synchronized with satellites and wake up GPS after propagation time.
When uploading operation is done, all information about localization is sent to microcontroller. Data transmitted from GPS are encoded in NMEA standard. Transmitting takes moderate amount of time. Few first processes are always empty or bugged, they are not important and not included into further calculations. Only one line is needed to read full information about analyzed object localization.
If measurements and data transmitting processes last for fifteen minutes and propagation time is set to two hours, then GPS would change its mode to sleep state in one hour and forty five minutes.
During preliminary tests, hot start took less than ten seconds.
Microcontroller reads only one $GPGGA line [5]. To choose the best one, dedicated algorithm seeks for single command, selected from fully transmitted and quality checked chunk of data. Next operation is handled by the parser. It cuts all information, that are useless for end-user. Then it wakes up GSM/GPRS module by sending high signal on turn_on input and awaits for status signal. It takes few seconds before GSM part is waked up and serial port is ready to communicate with microcontroller. If GSM and GPS parts are both powered on, AGPS could be used to take measurements faster, and with better precision.
After turning on or waking up the GSM/GPRS module, it automatically tries to connect with the wireless network. It is possible without any commands sent from microcontroller, when safe-lock PIN is turned off. GSM always asks for SIM card produced in standard ISO7816 to login into designated network [6].
Preliminary tests showed, that current had about 2A in the peak, while device was trying to identify wireless signals. Without it, GSM/GPRS part could have worked correctly, but wouldn’t been able to login into network. Those limitations make it very hard to implement solar technology as main power source for this solution.
When GSM/GPRS part is connected to the network, the signal is passed onto status output. Microcontroller uses commands in AT standard to send parsed data to the database. If actual position is the same as the previous one, then it is unnecessary to send it once again. If sent despite this fact, it is possible to observe within database, that device is still working.
More than one position could be saved in SIM card memory [7]. GSM could be turned on only once per many measurements. It is very energy-saving solution (important especially if device works in very cold weather conditions) and makes this hardware hard to detect, because it doesn’t transmit data all the time. To send information about position it is possible to use SMS or GPRS (optional) standards via GSM network [8]. After sending the data, microcontroller turns off the GSM module.
During tests with device stored within the building, all operations usually taken less than 40 seconds to generate final results.
Complex Tracking Circuit Design is equipped with multi-purpose software application, used to calculate and present data uploaded from GSM satellites system. Every device, which supports GSM and SIM card standards, is supported by the program.
Application lets user to upload multiple SMS messages into PC memory, by connecting GSM device with computer supplied with Microsoft Windows operating system. CTCD software requires connection made within COM interface (Serial Port or USB) to detect specified device. Using many instances of application on different PCs is simplified by script, which lets user to choose optimal port from only physically existing COM interfaces [9].
CTCD software decodes data uploaded from SIM card and calculates every NMEA parameter into decimal format. This information in presented in simplified form in application window. User might compare it with original $GPGGA command, which is also visible as on screen data [10]. Information stored in decimal format is used to generate specific http links, required by Google API systems. Created links include location information (coordinates) and additional parameters used in visualization process.
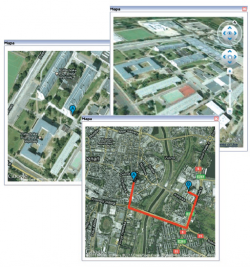
Data converted into decimal type information is used to present localization in graphical form. Application uses Google API technology to download specific maps, objects, roads and points, depending on chosen type of visual rendering [11]. Use of Google technology requires active Internet connection. Data downloaded by this protocol are temporally stored in default location on computers hard drive.
CTCD software allows user to choose visual presentation method. In first step of graphical rendering, operator specifies type of used API. Application supports standard Google Maps API and 3D Google Earth API [12, 13]. By using first mode, it is possible to apply additional filters [14]. Program has built-in ability to read more than one location information, stored on uploaded SIM card memory. This feature lets API to apply multiple coordinates onto map [15]. Another option uses calculated points to draw exact road taken by object analyzed with tracking device [16].
Important application feature is known as intelligent move prediction system. This option is used to calculate estimated points, where analyzed object should appear in future. Script takes into consideration parameters such as: exact time and coordinates of every past data, calculated speed and direction taken by the suspect, road estimated with past created point tags. Result is shown on map rendered into JPG format, which is requested from Google Maps server [17]. Future versions of presented application, might support animation mode for data visualization needs.
In case of user choosing Google Maps 3D API, software would present similar filter options as in standard Google Maps example. Main difference is type of presentation. In three dimensional mode, every point and road would be shown in isometric view with ability to change this camera position manually by the user. CTCD software uses JavaScript plug-in to operate with Google Maps 3D API, which enables full support for 3D models and high resolution textures. Every building existing in Google system will be shown in CTCD application.
Application is compatible with .NET platform and Microsoft Windows operating system.
Complex Tracking Circuit Design is representing modern solution in wireless localization and navigation industry sector. Project shows that even simple devices, low-cost products are able to serve as competitive tracking platforms. Fitting receiver with GSM technology makes them compatible with SIM cards and CTCD dedicated software.
Project is enhanced with Google Technology. By using two and three dimensional APIs systems, it is possible to take advantage of many overlays and filters applied in CTCD application. Software lets user to choose multiple different options and render graphic visualization in expected configuration.
Complex Tracking Circuit Design is ready, precision navigation solution, that works without dedicated receiver. Non-commercial software, backed with API Google Maps technology allows to render position of tracked object in graphical form with no cost.
Project presents simple device, that may find many possible applications in areas such as people localization, objects and animal protection, parcel tracking or traffic control. When it is combined with additional measuring devices, like thermometer, gas sensor etc., telemetry solutions also become possible. Device might be also applied in control circuits in modern mobile robots [18].
CTCD lets every user to take advantage of GSM and GPS technologies in any solution, which requires knowledge of information covering road taken by analyzed object, time of arrival at exact points and predicting next moves of defined suspects.
This project should present good alternative for low-budget sector needs. It generates advanced location and navigation information and lets user to control specified unit just by placing dedicated tracking device in right place [19]. Complex GPS and GSM information solution is now simple and precise enough to become product, that makes life easier and work more efficient.
The authors would like to acknowledge the contribution of S.K.I.M. department at Poznan University of Technology in making valuable suggestions in improving the contentof this paper.
Author: dr inż. Janusz Pochmara, inż. Jakub Pałasiewicz, inż. Piotr Szablata, Poznan University of Technology, Poznan, Poland
References (literatura):
[1] T omTom International,“Markets“, „Mobile“, 2011, Available: http://licensing.tomtom.com/Markets/Wireless-and-LBS/index.htm
[2] A yala K. J.: The 8051 microcontroller. Chapter 3, The 8051 Architecture. West Publishing Company, 2004.
[3] El-Rabbany A.: Introduction to GPS: the Global Positioning System. Chapter 2, “GPS Details”, Artech House, Inc., 2002.
[4] Xu G.: GPS Theory, Algorithms and Applications. Chapter 1, Introduction. Springer, 2007.
[5] L i D.: Computer and Computing Technologies in Agriculture. Volume 2“, X. Xiang, C. Yang. Design of Portable Instrument for Measuring Agriculture Field Size Based on GPS. Springer, 2008.
[6] Sauter M.: Communication Systems for the Mobile Information Society. Chapter 1.10, „The SIM Card“, Wiley Publishing, Inc., 2006.
[7] Eberspacher J., Vogel H., Bettstetter C., Hartmann C.: GSM Architecture, Protocols and Services. 3rd Edition, Chapter 3.2, The SIM concept. Wiley Publishing, Inc., 2009.
[8] Hillebrand F., Trosby F., Holley K., Harris I.: Short Message Service (SMS) The Creation of Personal Global Text Messaging. Chapter 6.2., SMS Compression. Wiley Publishing, Inc., January 2010.
[9] Wei-Meng Lee: Practical.Net 2.0 Networking Projects. Chapter 2, Serial Communications. Apress, 2007.
[10] Baddeley G.: NMEA sentence information. GPGGA – Global Positioning System Fix Data. 2009, Available: http://home.mira.net/~gnb/gps/nmea.html
[11] Dornfest R., Bausch P., Calishain T.: Google Hacks., Third Edition, Chapter 5, Google Maps. O‘Reilly Media, August 2006.
[12] Google, “Google Static Maps API”, “Static Maps API V2 Developer Guide”, 2011, Available: http://code.google.com/intl/pl-PL/apis/maps/documentation/staticmaps
[13] Google, “Google Earth API”, “Google Earth API Developer‘s Guide”, 2011, Aailable: https://developers.google.com/earth/documentation/?hl=pl-PL
[14] Crowder D. A.: Google Earth for Dummies. Part 111, Becoming a Cybertourist. Wiley Publishing, Inc., February 2007
[15] Brown M.C.: Hacking Google Maps and Google Earth. Part III, Google Maps Hacks. Wiley Publishing, Inc., July 2006.
[16] Shodiq A.: Tutorial Dasar Pemrograman Google Maps API. Map Direction, 2009, Available: http://www.scribd.com/amrishodiq/
[17] Gibson R., Erle S.: Google Maps Hacks. Chapter 2, Introducing the Google Maps API. O‘Reilly Media, January 2006.
[18] Braunl T.: Embedded Robotics, Mobile Robot Design and Application with Embedded Systems. Chapter 12, „Autonomous Planes“, Springer, 2008.
[19] Pochmara J., Pałasiewicz J., Szablata P.: Expendable GSM and GPS Systems Simulator. August 2010.

| REKLAMA |
|
|

| REKLAMA |
|
|






")
")
")
")











