|
|


01 luty 2011
 |

|

|

|






|
|
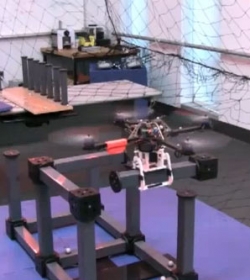
Rozwój w dziedzinie robotyki poskutkował powstaniem mini-helikopterów (quadrotorów), które teraz zaprezentowały umiejętność pracy zespołowej przy budowie konstrukcji takich jak wieże i ściany.
Grupa naukowa pod kierownictwem Daniela Mellingera z laboratorium GRASP (General Robotics, Automation, Sensing and Perception) na University of Pennsylvania opracowała miniaturowe quadrotory, które potrafią przeanalizować każdy obiekt i przemieścić go w odpowiednim miejscu konstrukcji. Zespół ostatnio udoskonalił robota dodając mu algorytm pracy zespołowej i system pozwalający budowanie struktur na podstawie projektu dostarczonego przez człowieka.
Autonomiczne quadrotory posiadają uniwersalny chwytak pozwalający na podnoszenie przedmiotów o różnych kształtach. Połączone elementy tworzą połączenia stałe dzięki magnesom umieszczonym na ich końcach. Praca zespołowa stała się możliwa dzięki sieci bezprzewodowej, a algorytm określa kolejność podnoszenia elementów i wyznacza jednostkę, która ma to wykonać dane zadanie.
Zdaniem Mellingera algorytm może być wykorzystywany do budowy większości konstrukcji w formie wież. Ograniczenia znajdujemy tylko w ilości elementów i pojemności baterii.
W zeszłym roku quadrotory wykorzystywane były do popisowych manewrów akrobatycznych. Dziś budują już wieże, co może być pierwszym krokiem do pełnoskalowych autonomicznych robotów lub dużej ilości małych robotów, które mogłyby tworzyć prawdziwe konstrukcje.
Potencjalne obszary wykorzystania to budownictwo wysokiego ryzyka, np. budowa drapaczy chmur lub obiektów w strefie wojny.
physorg.com

| REKLAMA |
|
|

| REKLAMA |
|
|
| REKLAMA |
|
|









