|

|

|

|
Energetyka, Automatyka przemysłowa, Elektrotechnika






|
|
|
|
|
Dr Masaaki Kumagai z uniwersytetu Tohoku Gakuin w Tagajo (Japonia) zbudował już wiele typów robotów, m.in.: kołowe, czworonogi, dwunożne, dwunożne roboty na rolkach i wiele innych.
Pewnego dnia jeden z jego studentów zaproponował stworzenie robota, który balansowałby na kuli. Dr Kumagai stwierdził, że to świetny pomysł i teraz możemy obserwować efekty prac nad tym projektem.
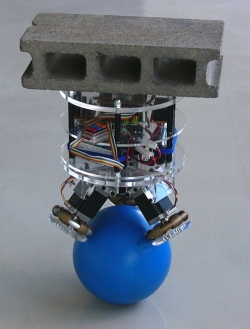
Robot porusza się na kuli do kręgli pokrytej warstwą gumy, za pomocą 3 niezależnych kółek, które powodują ruch kuli. Powoduje to, że robot nie tylko utrzymuje pozycję pionową w jednym miejscu ale możne przemieszczać się w dowolnym kierunku w płaszczyźnie poziomej.
Dr Kumagai wraz ze studentem przetestowali sprawność robota za pomocą 10-kilogramowych pustaków. "Zaprzęgli" go również do pracy - przewożenia dużej drewnianej ramy.
Robot mierzy około 50cm i waży 7,5kg. Kula, na której się porusza to około 3,6kg kula do kręgli o średnicy 20cm.
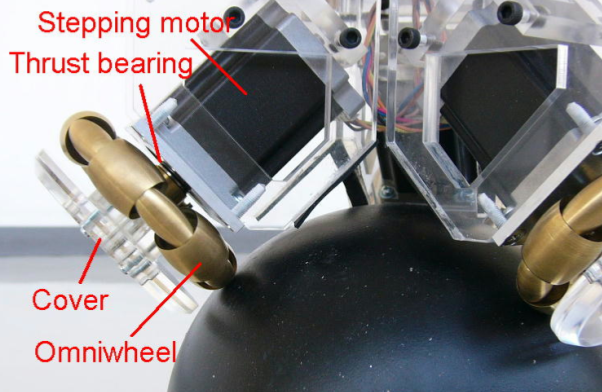
Mechanizm odpowiedzialny za ruch opiera się o trzy wielokierunkowe koła zaprojektowane w Japońskim instytucie R&D RIKEN. Do zasilania kół naukowcy wybrali kontroler krokowy i silnik NIDEC. W efekcie uzyskano dokładność 0,225 stopnia/krok co powoduje, że obracanie się kuli jest bardzo płynne.
Za nadzorowanie robota odpowiada 16-bitowy mikrokontorler, który odbiera dane z 2 zestawów analogowych systemów: żyroskopu i akcelerometru.
Jest to bardzo interesujące, że zastosowano oba systemy jednocześnie. Żyroskop potrafi wykrywać ruch szybki lub szybkozmienny, jednak nie nadaje się do wykrywania przechyleń robota i ostatecznie nie może zostać jedynym systemem monitorującym.
Robot posiada 2 moduły kontrolne. Pierwszy stara się utrzymać robota w pozycji pionowej w tym samym miejscu. Drugi również utrzymuje robota w stabilnej pozycji, jednak pozwala na jego popychanie co spowoduje wymuszenie ruchu.
Dr Kumagai chce aby robot znalazł praktyczne zastosowanie przy przenoszeniu różnych rzeczy, np. zakupów. Roboty również można łączyć w zespoły, które wspólnie wykonają pewne działania.

| REKLAMA |
|
|

| REKLAMA |
|
|
| REKLAMA |
|
|