strona główna  BAZA WIEDZY FDP Butterwortha ( projektowanie, charakterystyki czasowe i częstotliwościowe )
BAZA WIEDZY FDP Butterwortha ( projektowanie, charakterystyki czasowe i częstotliwościowe )
|
|
11 grudzień 2009


 |

|

|

|






|
|

Cel: Zaprojektować dolnoprzepustowy filtr Butterwortha o zadanych przez parametrach.
Zadane parametry filtrów dolnoprzepustowych
Ap = -0.5dB
Ar = -48dB
fp = 1000Hz
fr = 5500Hz
fd = 48000Hz
wzory nieczytelne są lepszej jakości po kliknięciu
Ze względu na zniekształcenie osi częstotliwości prototyp analogowy filtru cyfrowego projektuję według przeliczonej częstości granicznej. Posługuję się programem mathcad 13 do obliczenia wartości współczynników transmitancji filtru.

Wyznaczam współczynnik selektywności ‘k’
Wyznaczam współczynnik dyskryminacji ‘d’
Wyznaczam rząd filtru ‘N’
Przyjmuję rząd filtru
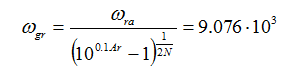
Przeliczam pulsację graniczną filtru ‘ωgr’ z dokładnym punktem (Ap,fp)
Z tablic wielomianów transmitancji filtrów Butterwortha odczytuję postać mianownika transmitancji filtru dla N = 4
ω unormowana ω s= ω / ωgr
Współczynniki transmitancji prezentowane w sprawozdaniu zostały zaokrąglone, projektując filtr przy pomocy programu mathcad zachowujemy wysoką dokładność ok. 17 miejsc po przecinku.
Transmitancja przyjmuje postać:
Dokonuję przekształceń transmitancji:

Transformacja na filtr cyfrowy:



Mnożę licznik i mianownik przez (z+1)4

Upraszczam wyrażenie i grupuję wyrazy a następnie dzielę licznik i mianownik przez ‘ z4’
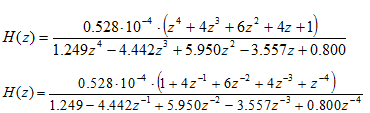
Dokładne wartości współczynników transmitancji wynoszą:
Współczynnik licznika
0.52832938982325704646e-4
Współczynniki mianownika
1.2492741213799666264
-4.4421205821121396861
5.9506837076443589775
-3.5574567543760017083
0.80046483448753300182
Przy pomocy programu Matlab w wersji 6.5 wyznaczam charakterystyki amplitudowe i fazowe zaprojektowanego filtru dolnoprzepustowego typu Butterwortha. Zamieszczam również komendy zastosowane w programie Matlab.
l=[1 4 6 4 1];
m=[1.2492741213799666264 -4.4421205821121396861 5.9506837076443589775 -3.5574567543760017083 0.80046483448753300182];
a=0.52832938982325704646e-4;
freqz([l]*a,[m],0:1:1000,48000),figure,freqz([l]*a,[m],999.9:0.01:1000.1,48000),figure,freqz([l]*a,[m],0:1:6000,48000),figure,freqz([l]*a,[m],5499:0.1:5501,48000)
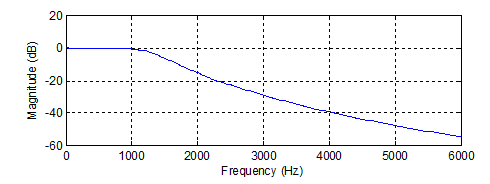
Płaska charakterystyka w paśmie przepustowym
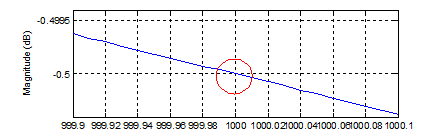
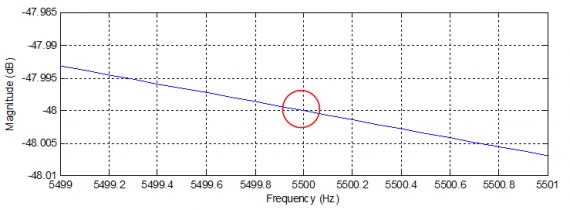
Tłumienie na końcu pasma przepustowego
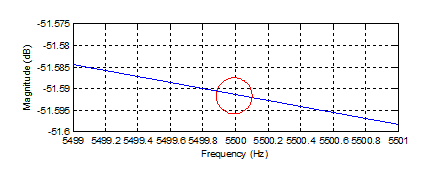
Oczywiście dla postaci znormalizowanej i kaskadowej charakterystyki są analogiczne z prezentowanymi powyżej. Filtr idealnie realizuje założenia projektowe m.in. ma płaską charakterystykę częstotliwościową w paśmie przepustowym. Dodatkowo przy częstotliwości 1000Hz tłumienie wynosi dokładnie 0.5dB a przy 5500Hz, gdzie zaczyna się pasmo zaporowe, tłumienie filtru osiąga wartość większą niż 51dB – jest większe o ponad 3dB od założonego co jest zjawiskiem pozytywnym ponieważ w paśmie zaporowym filtr tłumi sygnały lepiej niż to założyliśmy. Spowodowane jest to tym, że wyliczony rząd filtru nie jest wartością całkowitą. Do potrzeb projektowych zaokrąglamy tą wartość w górę. Ponadto przeliczenie częstotliwości granicznej dokonaliśmy za pomocą wzoru z dokładnym punktem (Ap,fp) co jest przyczyną takiego przebiegu charakterystyk.
Przeliczając częstotliwość graniczną względem punktu (Ar,fr) uzyskuję dokładną wartość tłumienia założonego przy częstotliwości 5500Hz gdzie zaczyna się pasmo zaporowe. W stworzonym arkuszu programu mathcad przeliczam częstotliwość graniczną względem punktu (Ar,fr).
Poniżej prezentuję efekty dokonanego przeliczenia transmitancji.
Współczynniki transmitancji oraz ich dokładne wartości

Wartości dokładne:
współczynnik licznika
0.79887511848703919826e-4
współczynnik mianownika
1.2798514410632130843
-4.4893587866007203332
5.9394469703326580220
-3.5100021133044900354
0.78134068869891852488
Poniżej prezentuję charakterystyki częstotliwościowe omawianego wyżej filtru
l=[1 4 6 4 1];
a=.79887511848703919826e-4;
m=[1.2798514410632130843 -4.4893587866007203332 5.9394469703326580220 -3.5100021133044900354 .78134068869891852488];
freqz([l]*a,[m],999:0.1:1001,48000),figure,freqz([l]*a,[m],5499:0.1:5501,48000);
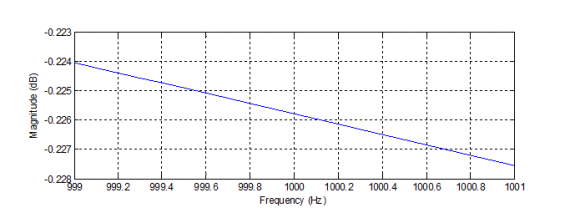
Jak widać sprawdziły się moje oczekiwania. Przy wyznaczeniu częstotliwości granicznej z dokładnym punktem (Ar,fr) amplitudowa charakterystyka częstotliwościowa przy 5500Hz osiąga wartości dokładnie -48dB. Natomiast taki filtr nie zapewniałby odpowiednio silnego tłumienia na końcu założonego pasma przepustowego przy częstotliwości 1000Hz.
Do dalszych rozważań będę się opierał przy filtrze, w którym częstotliwość graniczna była wyznaczona z dokładnym punktem (Ap,fp)
Do wyznaczenia charakterystyk czasowych posługuję się poleceniami programu matlab „dimpulse”- do wyznaczenia odpowiedzi impulsowej i „dstep” do wyznaczenia odpowiedzi skokowej. Poniżej podaję zestaw komend użytych do wyznaczenia prezentowanych charakterystyk
l=[1 4 6 4 1];
m=[1.2492741213799666264 -4.4421205821121396861 5.9506837076443589775 -3.5574567543760017083 0.80046483448753300182];
a=0.52832938982325704646e-4;
dimpulse(l*a,m),figure,dstep(l*a,m)
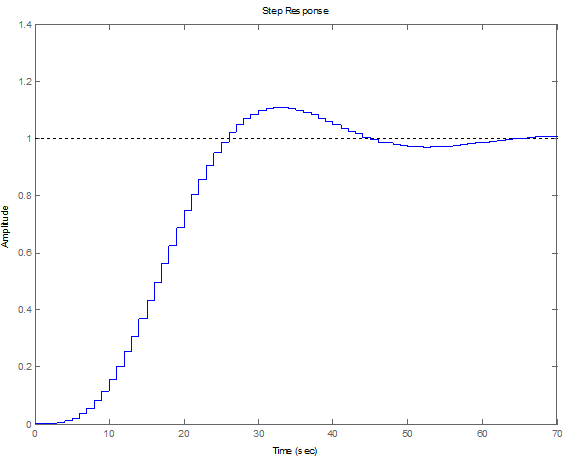
Odpowiedź skokowa
Odpowiedź impulsowa
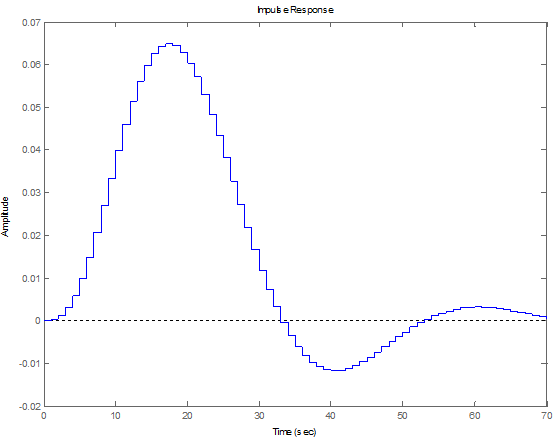
Charakterystyki czasowe informują nas o tym czy filtr jest stabilny czy nie. Badany filtr jest stabilny, jego odpowiedź impulsowa dąży do ‘0’ i mamy do czynienia z gasnącymi oscylacjami. Odpowiedź na skok jednostkowy dąży do ‘1’ gdyż, jak wiadomo, filtr dolnoprzepustowy przepuszcza składowe nisko częstotliwościowe i składową stałą, zaś tłumi składowe o wysokiej częstotliwości.


| REKLAMA |
|
|

| REKLAMA |
|
|
| REKLAMA |
| REKLAMA |
| REKLAMA |
|
|
 |
Politechnika Gdańska Grupa zrzeszająca pracowników, studentów i absolwentów Politechniki Gdańskiej. |
|
 |
Rolnictwo energetyczne Informacje dotyczące rolnictwa energetycznego, biogazowni, biopaliw, roślin energetycznych itp. |
|
 |
amatorzy elektroniki Nieelektronicy , fascynujący się tą dziedziną techniki . |
|
 |
Studenci i absolwenci ... Grupa zrzeszająca studentów i absolwentów Politechniki Śląskiej |
|
| REKLAMA |
|
|




 Czyszczenie dysz głowicy drukarki EPSON
Czyszczenie dysz głowicy drukarki EPSON
