strona głównaARTYKUŁYElektronikaJednołącznikowy falownik napięciowy klasy E w zastosowaniu do nagrzewania indukcyjnego – topologia, cykle pracy oraz koncepcja sterowania modelu układu
Jednołącznikowy falownik napięciowy klasy E w zastosowaniu do nagrzewania indukcyjnego – topologia, cykle pracy oraz koncepcja sterowania modelu układu
autor: mgr inż. Aleksander Skała, dr inż. Zbigniew Waradzyn - Katedra Energoelektroniki i Automatyki Systemów Przetwarzania Energii, Akademia Górniczo-Hutnicza w Krakowie
Nagrzewanie materiałów lub elementów jest etapem bardzo wielu procesów technologicznych. Często jest ono realizowane poprzez przemianę w ciepło energii elektrycznej, zwaną przemianą elektrotermiczną. Jedną z najpowszechniej stosowanych metod elektrotermicznych jest nagrzewanie indukcyjne, polegające na wytwarzaniu ciepła przy przepływie prądów wirowych przez ośrodek przewodzący. Prądy te indukują się w nim poprzez sprzężenie magnetyczne z tzw. wzbudnikiem, przez który przepływa prąd o odpowiednio dobranej częstotliwości i natężeniu. W metodzie tej wykorzystywane jest zjawisko indukcji elektromagnetycznej Faradaya, stąd jej nazwa. Wzbudnik to odpowiednio ukształtowany przewodnik miedziany (zwykle chłodzony wodą), najczęściej w postaci cylindrycznej lub płaskiej cewki, jedno- lub wielozwojowej. Obiekt poddawany procesowi nagrzewania nosi nazwę wsadu. Przez odpowiedni dobór kształtu wzbudnika i częstotliwości prądu zasilającego można uzyskać precyzyjne dozowanie energii w ściśle określonych obszarach wsadu. Nagrzewanie indukcyjne jest powszechnie stosowane przede wszystkim do nagrzewania i topienia metali.
Do powszechnie dziś stosowanych źródeł zasilania indukcyjnych urządzeń grzejnych należą statyczne przemienniki częstotliwości budowane z wykorzystaniem tranzystorów. Przemiennik częstotliwości, którego zadaniem jest przetworzenie prądu pobranego z sieci zasilającej w prąd o innej wartości i częstotliwości, składa się zwykle z prostownika, obwodu pośredniczącego prądu lub napięcia stałego oraz falownika. Z uwagi na ilość zastosowanych zaworów energoelektronicznych można wyróżnić przede wszystkim falowniki mostkowe z czterema zaworami (łącznikami) półprzewodnikowymi, układy półmostkowe – z dwoma łącznikami oraz kilka rodzajów falowników jednołącznikowych. Układy jednołącznikowe pomimo swoich ograniczeń (zwłaszcza dotyczących mocy wyjściowej) są rozwijane ze względu na możliwości konstruowania wysokosprawnych, możliwie niezawodnych i kompaktowych urządzeń do wykorzystania w różnych aplikacjach, takich jak: nagrzewanie indukcyjne, ale także diatermii chirurgicznej, magnetoterapii, itp. Jednym z nich jest układ przedstawiony na rys. 1, będący tematem niniejszego opracowania. Układ ten, należący do falowników klasy E, został przedstawiony w literaturze głównie przy zastosowaniu w kuchniach indukcyjnych, pracujących zwykle w zakresie częstotliwości 20…50 kHz, m. in. w pracach [1–3].
Celem autorów niniejszego opracowania jest prezentacja właściwości falownika i następnie zastosowanie go w nagrzewaniu indukcyjnym przy częstotliwości prądu wyjściowego wynoszącej kilkaset kiloherców, czyli o ok. rząd wielkości wyższej niż częstotliwość stosowana w opisanych zastosowaniach. Tak duża częstotliwość, z uwagi na wydzielanie się mocy użytecznej jedynie w obszarze przypowierzchniowym wsadu, umożliwia nagrzewanie i topienie elementów o małych wymiarach, jak i realizację procesu hartowania powierzchniowego. Z tą samą częstotliwością przełączany jest tranzystor, co powoduje powstawanie w nim strat łączeniowych, które są proporcjonalne do częstotliwości. Dlatego szczególna uwaga zostanie zwrócona na pracę optymalną falownika, przy której straty przełączania tranzystora są najmniejsze.
Schemat falownika
Falownik (rys. 1) zasilany jest ze źródła napięcia stałego Ud. Przy zastosowaniu falownika do nagrzewania indukcyjnego elementy R0 i L0 reprezentują układ wzbudnik – wsad, będący odbiornikiem. Przy innych zastosowaniach odbiornikiem może być rezystancja R0, zaś L0 jest wtedy elementem obwodu rezonansowego. W obu przypadkach kondensator C jest dopełnieniem tego obwodu, a jego pojemność dobierana jest tak, aby uzyskać wymaganą częstotliwość oscylacji. Jako zawór energoelektroniczny zastosowano tranzystor MOSFET.
Rys. 1. Schemat falownika jednołącznikowego
Opis taktów pracy falownika
Działanie falownika w stanie ustalonym podczas jednego cyklu pracy można podzielić na dwa etapy (takty) pokazane na rys. 2.
Takt I (czas trwania T1): łącznik (tranzystor lub najpierw jego wewnętrzna dioda, a następnie tranzystor) przewodzi prąd elektryczny. Następuje wykładniczy wzrost prądu obciążenia i0(t), przy praktycznie stałym napięciu na kondensatorze C (teoretycznie – stałym, w praktyce – z niewielkimi oscylacjami wywołanymi drganiami w obwodzie rezonansowym jaki tworzy pojemność kondensatora głównego obwodu rezonansowego i indukcyjności pasożytniczych układu). W tym takcie napięcie na tranzystorze jest równe zero (w praktyce jest to wartość spadku napięcia na przewodzącej strukturze półprzewodnikowej, która jest również zależna od wielkości przewodzonego prądu).
Takt II (czas trwania T2): Tranzystor zostaje wyłączony i w tym momencie zaczyna się przeładowanie w obwodzie oscylacyjnym R0L0C. Prąd i0 odbiornika oraz napięcie uC na kondensatorze mają kształt sinusoid tłumionych, przy czym początkowa wartość napięcia na kondensatorze jest równa napięciu zasilania Ud. Jeśli rezystancja w gałęzi R0L0 jest odpowiednio mała, tłumienie takiego przebiegu również jest niewielkie i przy właściwym sterowaniu, napięcie uC na kondensatorze przy przeładowaniu ponownie osiąga wartość równą napięciu zasilania Ud (co jest wyznacznikiem końca taktu II i rozpoczęcia taktu I następnego cyklu). Możliwe są wtedy dwa przypadki:
Wielkość Ud jest maksymalną wartością osiąganą przez napięcie na kondensatorze podczas przeładowania. Pochodna napięcia uC względem czasu w chwili osiągnięcia wartości Ud jest więc równa zero, co oznacza zerową wartość prądu kondensatora. Należy wtedy załączyć tranzystor i takt I następnego cyklu rozpocznie się od przewodzenia tranzystora przy narastaniu jego prądu od zera. Uzyskuje się bardzo korzystne warunki załączania tranzystora (praktycznie zerowe straty mocy w tranzystorze). Ten rodzaj pracy falownika określany jest mianem pracy optymalnej i jest opisany bardziej szczegółowo w dalszej części opracowania.
Napięcie uC na kondensatorze po przeładowaniu ponownie osiąga wartość równą napięciu zasilania Ud przy niezerowym prądzie kondensatora oraz odbiornika (czyli z pochodną różną od zera). Napięcie uC ma tendencję do dalszego narastania, ale jest to niemożliwe z uwagi na strukturę układu. Zaczyna samoczynnie przewodzić dioda wewnętrzna tranzystora przejmując prąd kondensatora. W konsekwencji takt I następnego cyklu pracy falownika rozpoczyna się od przewodzenia diody. Prąd i0 jest ujemny i zmierza do zera; przed jego przejściem przez zero (zanikiem prądu diody) należy ponownie załączyć tranzystor, który przejmie prąd i0. Taki stan pracy można określić jako suboptymalny – straty przełączania są nieco większe niż przy pracy optymalnej.
W obu wymienionych wyżej przypadkach załączanie tranzystora następuje przy praktycznie zerowym napięciu na tranzystorze ZVS (ang. Zero Voltage Switching).
Możliwy jest jeszcze jeden przypadek pracy falownika, kiedy napięcie uC na kondensatorze podczas przeładowania nie osiąga ponownie wartości Ud. Oznacza to, że napięcie na tranzystorze nie dochodzi do zera. W momencie załączenia tranzystora, nawet w minimum tego napięcia, powstanie więc znaczny udar prądu doładowania kondensatora C ze źródła zasilania. Spowoduje to dodatkowe obciążenie prądowe tranzystora i co za tym idzie – zwiększenie strat i obniżenie sprawności układu. Do tego dochodzi jeszcze dodatkowa energia strat w tranzystorze podczas jego załączania z powodu zwierania pojemności wyjściowej tranzystora przez jego rezystancję. Omawiany przypadek może mieć miejsce wtedy, gdy czas trwania taktu I jest zbyt krótki, aby w indukcyjności zgromadzić ilość energii wystarczającą do wydzielenia się w rezystancjach obwodu oraz przeładowania kondensatora. Innym powodem może być zbyt duże tłumienie obwodu rezonansowego R0L0C. Ten stan pracy jest niekorzystny energetycznie i należy go unikać, zwłaszcza przy dużej częstotliwości przełączania tranzystora. Można go określić mianem pracy nieoptymalnej.
Rys. 2. Cykle pracy falownika
Istnieje potencjalna możliwość regulacji mocy wyjściowej falownika poprzez dopuszczenie do większej ilości samoczynnych przeładowań w obwodzie drgającym R0L0C (zwłaszcza przy małym tłumieniu obwodu). Taki sposób regulacji pozwala wyłącznie na obniżenie mocy wyjściowej urządzenia. Wymaga on wydłużenia czasu przewodzenia łącznika w II-gim takcie pracy. W omawianym przypadku możliwa jest także praca optymalna – załączanie tranzystora przy zerowych wartościach napięcia na tranzystorze i jego pochodnej. Napięcie uC osiąga przy wcześniejszej oscylacji (wcześniejszych oscylacjach) wartości większe od Ud – dlatego wymienionym wyżej warunkiem takiej pracy jest brak diody zwrotnej.
Stan pracy optymalnej
Przebiegi prądów i napięć w falowniku podczas pracy optymalnej przedstawiono na rys. 3. Praca falownika jest optymalna ze względu na minimalizację strat przełączania, jeśli w chwili t2 zakończenia taktu II spełnione są warunki:
Oznacza to, że napięcie uC osiąga wartość równą napięciu zasilania Ud w tej samej chwili, w której prąd i0 oraz prąd kondensatora iCzanikają do zera. Należy wtedy załączyć tranzystor, co zapoczątkuje takt I kolejnego cyklu.
Czas T1 przewodzenia tranzystora można określić przez współczynnik D (gdyż: T1 = DTs). Czas T2 przeładowania w obwodzie rezonansowym R0L0C można opisać jako T2 = (1-D)Ts.. Czasy: T1 oraz T2 dają w sumie okres sterowania TS.
Załączanie tranzystora następuje przy zerowym napięciu (ZVS), jego zerowej pochodnej ZDS, ZVDS (ang. Zero-Voltage-Derivative Switching) oraz – w konsekwencji – zerowym prądzie ZCS (ang. Zero-Current Switching), co przedstawia rys. 3.
Rys. 3. Przebiegi prądów i napięć w falowniku dla pracy optymalnej: uG – sygnał bramkowy, i0 – prąd odbiornika, iT – prąd tranzystora, uC – napięcie na kondensatorze, uT – napięcie na tranzystorze
Natomiast wyłączanie tranzystora odbywa się przy zerowym napięciu, ale niezerowym prądzie (ZVS + NZCS). Są to warunki charakterystyczne dla układów klasy E, która umożliwia uzyskanie najlepszych możliwych do osiągnięcia warunków przełączania zaworów energoelektronicznych. Dlatego omawiany falownik należy do tej klasy.
Ilość energii zgromadzonej w indukcyjności L0 na końcu taktu I, powinna równoważyć ilość energii we wsadzie oraz energii strat w obwodzie wydzielonych w takcie II. Wielkość tej energii jest zależna m. in. od czasu przewodzenia tranzystora, który reprezentuje współczynnik D.
Przy zadanych parametrach R0, L0 i C praca optymalna wymaga ściśle określonych wartości częstotliwości pracy oraz czasu przewodzenia tranzystora. Odpowiednie zależności podano w [4]. Zwiększenie czasu przewodzenia tranzystora (wzrost współczynnika D) powoduje przejście do pracy suboptymalnej oraz zwiększenie mocy. Natomiast zmniejszenie współczynnika D, uniemożliwia ponowne osiągnięcie przez napięcie uC na kondensatorze (na końcu II-go taktu pracy), wartości równej napięciu zasilania, co skutkuje koniecznością załączania tranzystora przy niezerowym napięciu – praca nieoptymalna.
Prezentacja wzbudnika, obliczenia parametrów schematu zastępczego, przyjęte parametry R0L0C do analizy i budowy układu
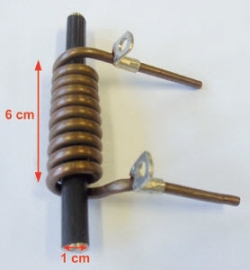
Wykonany wzbudnik nagrzewnicy indukcyjnej prezentuje rys. 4. Obliczenia zostały prowadzone pod kątem wyznaczenia parametrów schematu zastępczego tego układu oraz doboru optymalnego pod względem częstotliwości prądu odbiornika i0(t).
Rys. 4. Widok ogólny wzbudnika nagrzewnicy indukcyjnej wraz ze wsadem stalowym
W celu oszacowania rezystancji samego wzbudnika wykonano serię pomiarów miernikiem firmy Megger: Digital Low Resistance Meter DLRO 10. Wartość średniej arytmetycznej serii 10 pomiarów rezystancji przy wymuszeniu prądowym: 10A DC (z metalowym wsadem i bez wsadu otrzymano taki sam wynik) wyniosła: 890,7 μΩ. Jest to wielkość oporu elektrycznego materiału wzbudnika (miedź) i styków pomiędzy samym wzbudnikiem, a końcówkami montażowymi dla prądu stałego. Rezystancja wzbudnika podczas pracy falownika z wielką częstotliwością jest dużo większa, m.in. ze względu na zjawisko naskórkowości oraz impedancję wnoszoną przez wsad – przytoczony pomiar wykonano w celu porównania z rezystancją dla wielkiej częstotliwości i zademonstrowania wpływu częstotliwości na parametry układu.
Dla wstępnego oszacowania indukcyjności wzbudnika L0 (w stanie jałowym, bez wsadu) zmierzono również wartość indukcyjności miernikiem MIC-40700 LCR Meter. Otrzymano wartość: 0,45 μH.
Definicja parametrów wejściowych i wyjściowych falownika oraz założenia upraszczające przyjęte podczas wstępnej analizy układu
1. Częstotliwość pracy falownika (minimalna) – fs = 200 kHz
2. Nominalne napięcie zasilania falownika – Ud = 30–60 V.
W celu optymalizacji pracy układu falownika przyjęto założenia upraszczające [5], [6]:
sinusoidalny prąd obciążenia – co się wiąże z założeniem dużej dobroci układu,
elementy bierne obwodu są idealne,
obciążeniem falownika jest odbiornik R0L0.
W celu weryfikacji otrzymanych wyników zastosowano następnie metodę oporów magnetycznych[7]. Podstawą do budowy schematu zastępczego jest analiza rozpływu strumieni magnetycznych w układzie wzbudnik – wsad.
Schemat zastępczy indukcyjnego układu grzejnego da tej metody przedstawiono na rys. 7, zaś wyniki obliczeń w tab. 3.
Rys. 7. Schemat zastępczy dla metody oporów magnetycznych
Wielkości XΔ i X2 reprezentują reluktancje związanie odpowiednio ze strumieniem rozproszenia ΦΔ przenikającym szczelinę powietrzną pomiędzy wsadem a wzbudnikiem oraz strumieniem Φ2 przenikającym wsad. Rezystancja R2 to rezystancja wnoszona przez wsad, zaś reaktancja X0 jest związana z głównym strumieniem magnetycznym Φ.
Tab. 3. Wyniki obliczeń metodą oporów magnetycznych:
Ponieważ obliczenia dotyczące parametrów schematu zastępczego znacznie się różnią w przypadku dwóch użytych metod (zwłaszcza wartość rezystancji zastępczej układu), do dalszej weryfikacji zastosowano trzecią metodę transformatora powietrznego [7]. W metodzie tej wsad zastępowany jest zwojem zwartym. Uzwojenia wzbudnika oraz zwój zwarty tworzą wówczas transformator powietrzny w stanie zwarcia, przy czym liczba zwojów uzwojenia wtórnego wynosi: w2 = 1.
Schematy zastępcze układu grzejnego wzbudnik – wsad dla metody transformatora powietrznego przedstawiono na rys. 8, a wyniki obliczeń podano w tab. 4. Występujący w niej współczynnik p12 zależy od wymiarów oraz parametrów wzbudnika i wsadu [7].
Rys. 8. Schematy zastępcze układu grzejnego wzbudnik-wsad dla metody transformatora powietrznego
Tab. 4. Wyniki obliczeń metodą transformatora powietrznego:
Obliczenie parametrów wykonanego wzbudnika na podstawie jego gabarytów zewnętrznych nie jest proste, a otrzymane wyniki w zależności od użytej metody bardzo się od siebie różnią. Konieczne jest jednak wstępne przyjęcie wartości wyjściowych takiej konstrukcji w celu symulacji układu zmierzającej do weryfikacji jego warunków pracy i wypracowania metod, które pozwolą optymalnie sterować urządzeniem.
Metoda oporów wniesionych jest wystarczająco dokładna dla wsadów długich. Zależności określające wielkości parametrów zostały wyprowadzone dla układu o nieskończonej długości, a ich skończoną długość koryguje się następnie za pomocą współczynników korekcyjnych. Niedokładność metody jest związana z założeniami, iż linie pola elektromagnetycznego są prostopadłe do wsadu (pomija się warunki brzegowe), co w przypadku układów relatywnie krótkich wyraźnie pogarsza wiarygodność obliczeń, nawet pomimo zastosowania współczynników korekcyjnych.
Metoda oporów magnetycznych ma zastosowanie przede wszystkim do obliczania układów grzejnych z wsadami magnetycznymi. Jednocześnie jest stosowana do obliczeń układów grzejnych o skończonych wymiarach. Należy do najczęściej stosowanych sposobów obliczeniowych, dając zwykle dobre przybliżenia wartości rzeczywistych.
Natomiast metoda transformatora powietrznego jest stosowana przede wszystkim do obliczeń układów grzejnych z wsadami niemagnetycznymi o skończonych wymiarach. Należy do najczęściej stosowanych metod, dając również dobre przybliżenia parametrów rzeczywistych układu wzbudnik – wsad. Należy przy tym pamiętać, że w analizowanym przypadku:
wzbudnik wykonano z okrągłej rurki, a obliczenia są dokładniejsze dla rurki o przekroju prostokątnym,
wsad wystaje poza wzbudnik, ale nie jest wielokrotnie dłuższy od wzbudnika, jak podaje [7], mówiąc o nagrzewaniu miejscowym,
głębokość wnikania pola elektromagnetycznego do wsadu jest bardzo mała i nie jest to częstotliwość właściwa dla nagrzewania skrośnego tego wsadu; przykładowo współczynnik χ2 dla wsadu zimnego wynosi ok. 80, a w [7, tabl. V] jego zakres jest tylko do 20,
ogromną trudność sprawia dokładne określenie przenikalności magnetycznej względnej μr stali z której wykonany jest wsad, a który ma kluczowe znaczenie dla tłumienia w układzie rezonansowym i tym samym generacji ciepła; wartości przenikalności μr dla stali mogą się wahać w granicach: od jedności (μr dla stali zwykłej w temperaturze 800°C; μr = 16 dla tej samej stali zwykłej w temperaturze 20°C), do wartości wielu tysięcy (izotropowa stal elektrotechniczna (Fe96Si4) – 7000; anizotropowa stal elektrotechniczna (Fe97Si3) – 100000).
W związku z powyższymi właściwościami metod obliczeniowych oraz mając na uwadze powyższe nieścisłości, do dalszych rozważań i symulacji, przyjęto wstępnie uśrednione wartości obliczonych parametrów rezystancji zastępczej odbiornika R0, reaktancji zastępczej odbiornika X0 i indukcyjności zastępczej odbiornika L0 dla temperatur: 20°C i 800°C, przy założonej częstotliwości prądu odbiornika równej f = 470 kHz.
Tab. 5. Zestawienie wyników obliczeń:
Metoda
20°C
800°C
Rz = R0
Xz = X0
L0
Rz = R0
Xz = X0
L0
oporów wniesionych
73,84 mΩ
618,4 mΩ
0,21 μH
45,6 mΩ
592,65 mΩ
0,2 μH
oporów magnetycznych
262,7 mΩ
482,5 mΩ
0,163 μH
146,6 mΩ
366,2 mΩ
0,124 μH
transformatora powietrznego
73,7 mΩ
547,09 mΩ
0,186 μH
45,55 mΩ
566,92 mΩ
0,195 μH
Wartości średnie parametrów:
136,75 mΩ
549,33 mΩ
0,185 μH
79,25 mΩ
508,59 mΩ
0,17 μH
Symulacja pracy falownika w pakiecie IsSpice
Uzyskane drogą symulacji w programie IsSpice przebiegi prądów i napięć w falowniku przy pracy optymalnej i przyjęciu średnich wartości parametrów z tab. 5 dla 20°C przedstawiono na rys. 9. Po przyjęciu pojemności kondensatora C równej 0,42 μF symulowany obwód można scharakteryzować dobrocią Q (daną zależnością ), wynoszącą 4,86. W symulacji wykorzystano bibliotekę tranzystora IRFP260, którego użyto w konstrukcji modelu układu. Maksymalne napięcie na kondensatorze przekracza ok. 2,5-krotnie wartość napięcia zasilania Ud.
Rys. 9. Przebiegi prądu iT tranzystora, napięcia uT na tranzystorze, prądu i0 wzbudnika oraz napięcia uC na kondensatorze C dla falownika o średnich wartościach parametrów z tab. 5 przy 20°C (co odpowiada Q = 4,86) oraz C = 0,42 μF, Ud = 40 V; fs = 485 kHz
Dla zobrazowania wpływu tłumienia obwodu rezonansowego na przebiegi prądów i napięć na rys. 10 i 11 przedstawiono przebiegi prądów i napięć w falowniku dla obwodów o innych wartościach tłumienia. Widoczny jest znaczny wzrost odkształcenia prądu odbiornika przy zwiększaniu tłumienia obwodu.
Podsumowanie
Analizowany w pracy falownik może pracować optymalnie w klasie E pod warunkiem, że dobroć obwodu szeregowego R0L0C jest wystarczająco duża (Q > ok. 2,61).
Regulacja mocy falownika pracującego optymalnie jest możliwa przez zmianę napięcia zasilania. Alternatywą jest odejście od pracy optymalnej przez odpowiednie zwiększenie czasu przewodzenia tranzystora i okresu jego przełączania, co skutkuje zwiększeniem mocy falownika przy zachowaniu przełączania ZVS. Możliwym rozwiązaniem regulacji mocy jest także wydłużenie taktu II-go pracy falownika i dopuszczenie w układzie do wielokrotności przeładowań w obwodzie rezonansowym R0L0C.
Wymaga to jednak użycia łączników bez diody zwrotnej. Taki sposób regulacji pozwala wyłącznie na obniżenie mocy wyjściowej urządzenia. Zaletą omawianego falownika jest zastosowanie tylko jednego zaworu energoelektronicznego, a wadą – duża wartość napięcia na łączniku przy dużym tłumieniu w obwodzie rezonansowym (np. ze wsadem ze stali ferromagnetycznej). Wada ta staje się jednak mniej istotna w przypadku zastosowania zaworu nowej generacji, np. wykonanego w technologii SiC.
Rys. 10. Przebiegi prądu iT tranzystora, napięcia uT na tranzystorze, prądu i0 wzbudnika oraz napięcia uC na kondensatorze C dla przykładowego obwodu o mniejszym tłumieniu (Q = 9,87) oraz Ud = 40 V; fs = 361 kHz
Rys. 11. Przebiegi prądu iT tranzystora, napięcia uT na tranzystorze, prądu i0 wzbudnika oraz napięcia uC na kondensatorze C dla przykładowego obwodu o większym tłumieniu (Q = 2,8531) oraz Ud = 40 V; fs = 222 kHz
Założenia dotyczące mocy wyjściowej falownika
Jako obciążenie analizowanego układu falownika przyjęto końcówkę grzejną w postaci wzbudnika z nagrzewanym wsadem. Wsad stanowi stalowy pręt w kształcie walca o wymiarach:
długość całkowita wsadu l2 = 13 cm,
średnica Ø: 10 mm.
Przyjęcie takiego wymiaru wsadu (długość l2 wsadu znacznie większa od długości całkowitej l1 wzbudnika) niesie ze sobą dodatkową trudność obliczeniową, ponieważ generacja ciepła nastąpi głównie na długości wsadu wewnątrz wzbudnika (wskutek koncentracji indukowanych prądów bezpośrednio pod wzbudnikiem).
W rozważaniach teoretycznych przyjmuje się, że natężenie pola magnetycznego wewnątrz nieskończenie długiego wzbudnika ma wartość stałą, natomiast na zewnątrz jest równe zeru [7].
Jest to przypadek tzw. nagrzewania miejscowego, w którym długość wsadu jest znacznie większa od długości wzbudnika. Dopuszczalne jest wtedy przyjęcie do obliczeń równości długości wsadu i długości całkowitej wzbudnika: l2 = l1 [7].
W związku z powyższym część wystająca poza wzbudnik została uwzględniona przy obliczaniu ilości ciepła koniecznego do rozgrzania wsadu o zadany gradient temperatury (uwzględniono bardzo dobrą przewodność cieplną stali), co wydłuży czas nagrzewania wsadu lub będzie wymagało dostarczenia odpowiednio większej mocy użytkowej dla zachowania szybkości nagrzewania.
Przyjęto również, jako cel, rozgrzanie środkowej części wsadu na długości 6 cm do temperatury 850ºC, kiedy to stal żarzy się w kolorze pełnym czerwonym [8], w czasie 2 minut.
Ilość ciepła potrzebna do podniesienia temperatury wsadu od temperatury pokojowej, tzn. od 20ºC do temperatury 850ºC:
Q = m⋅cw ⋅ (tk − tp)
gdzie: m – masa wsadu, cw – ciepło właściwe stali = 460 [J/(kg·deg)], tk – temperatura końcowa wsadu, tp – temperatura początkowa wsadu.
Gęstość stali ≈ 7,86 g/cm3 [9], objętość walca dla wymiarów podanych powyżej: 10,21 cm3. Wobec powyższego, masa wsadu wynosi: 80,25 g.
Zatem:
Q = 80,25⋅10−3 ⋅0,46⋅ (850 − 20) = 30,64 kJ
Oznacza to, że moc użyteczna dostarczona do wsadu powinna wynosić:
PUZ = Q/t = 30640/120 = 255,33 W
Wyznaczanie parametrów schematu zastępczego układu wzbudnik – wsad dla zbudowanej końcówki grzejnej i przyjętego wsadu
Indukcyjny układ grzejny składający się ze wzbudnika i wsadu, jest odbiornikiem energii elektrycznej, a tym samym może być rozpatrywany jako szeregowe połączenie rezystancji R0 i reaktancji X0 (rys. 5). Do prowadzenia dalszych analiz i symulacji komputerowych, obliczono kilkoma metodami wartości zastępczych parametrów elektrycznych Rz i reaktancji Xz, które mogą reprezentować wykonaną końcówkę grzejną (wzbudnik ze wsadem).
Rys. 5. Szeregowy schemat zastępczy indukcyjnego układu wzbudnik – wsad
W niniejszym punkcie wyznaczono parametry elektryczne schematu zastępczego indukcyjnego układu wzbudnik – wsad, którego wzbudnik cylindryczny ma wymiary (symbole z dolnym indeksem 1 dotyczą wzbudnika):
długość całkowita wzbudnika l1 = 6 cm,
liczba zwojów w1 =10,
średnica zewnętrzna rurki, z której wykonano wzbudnik drz = 5 mm,
grubość ścianki rurki gr = 1 mm,
średnica wewnętrzna wzbudnika d1w = 13 mm.
Pozostałe parametry układu nagrzewnicy to:
częstotliwość prądu zasilającego f = 470 kHz,
temperatura otoczenia (stan początkowy) υ =20°C,
konduktywność miedzi σ = 56·106 S/m.
Obliczenia parametrów schematu zastępczego indukcyjnego układu grzejnego przeprowadzono najpierw dla wzbudnika w stanie jałowym, tzn. nieobciążonego wsadem (rezystancja wzbudnika R1 oraz reaktancje X10w), a następnie uwzględniono opory wnoszone do układu przez wsad (rezystancja odpowiadająca mocy czynnej wydzielanej we wsadzie Rw i reaktancja odpowiadająca mocy biernej pobieranej przez wsad Xw) oraz reaktancję rozproszenia układu wzbudnik – wsad: XΔ. Jest to tzw. metoda oporów wniesionych [7].
Tabela 1 zawiera dane dotyczące stanu jałowego. R1 oznacza rezystancję uzwojenia wzbudnika, X10w – reaktancję wewnętrzną wzbudnika, związaną ze strumieniem magnetycznym przenikającym wzbudnik, zaś XΔ0 – reaktancję zewnętrzną wzbudnika, związaną ze strumieniem magnetycznym przenikającym przestrzeń wewnątrz wzbudnika. Rz i Xz to odpowiednio rezystancja i reaktancja zastępcza wzbudnika zgodnie z rys. 5. Z0 jest impedancją wzbudnika, zaś L0 – jego indukcyjnością.
Tab. 1. Wyniki obliczeń dla stanu jałowego:
Wszystkie obliczenia, na podstawie których otrzymano zależności zamieszczone w tabelach. 1–4 wykonano na podstawie [7]. Schemat zastępczy indukcyjnego układu grzejnego w stanie obciążenia dla wspomnianej wyżej metody oporów wniesionych przedstawia rysunek R2, zaś w tab. 2 zawarto wyniki obliczeń wykonanych tą metodą.
Rys. 6. Szeregowy schemat zastępczy indukcyjnego układu wzbudnik-wsad dla metody oporów wniesionych
Tab. 2. Wyniki obliczeń metodą oporów wniesionych:
W stosunku do stanu jałowego, rezystancja zastępcza układu w stanie obciążenia znacznie się zwiększyła, co jest związane z tłumieniem jakie wnosi do układu wsad. Reaktancja zastępcza układu zmniejszyła się, co jest spowodowane zmniejszeniem strumienia magnetycznego wzbudnika na skutek oddziaływania wsadu.
Literatura:
[1] Omori H., Yamashita H., Nakaoka M., Maruhashi T.: A Novel Type Induction-Heating Single-Ended Resonant Inverter Using New Bipolar Darlington-Transistor. IEEE Power Electronics Specialist Conference Rec., 1985, Vol. 1, pp. 590–599.
[2] Llorente S., Monterde F., Burdío J.M., Acero J.: A Comparative Study of Resonant Inverter Topologies Used in Induction Cookers, Applied Power Electronics Conference and Exposition, APEC 2002, Vol. 2, pp. 1168–1174.
[3] Saoudi M.; Puyal D.; Bernal C.; Antón, D.; Mediano, A.: Induction Cooking Systems with Single Switch Inverter Using New Driving Techniques, Industrial Electronics (ISIE), 2010 IEEE International Symposium on, vol. no. 4–7 July 2010, pp. 878–883.
[4] Jednołącznikowy falownik z przełączaniem ZVS do nagrzewania indukcyjnego – praca optymalna. Referat wygłoszony na Konferencji: Problemy Cieplne w Elektrotechnice i Elektrotechnologie, Konopnica, wrzesień 2013.
[5] Kaczmarczyk Z.: Falownik klasy E – teoria i praktyka przekształtnika wysokiej częstotliwości. Przegląd Elektrotechniczny nr 9/2004.
[6] Citko T., Tunia H., Winiarski B.: Układy rezonansowe w energoelektronice. Seria Postępy Napędu Elektrycznego i Energoelektroniki. Wydawnictwo Politechniki Białostockiej 2001 r.
[7] Sajdak Cz., Samek E.: Nagrzewanie indukcyjne. Podstawy teoretyczne i zastosowanie. Wydawnictwo „Śląsk”, Katowice 1985.
[8] A ndrew Livesey, Alan Robinson: Repair of vehicle bodies. Amsterdam: Elsevier, Butterworth-Heinemann, 2006, s. 166. ISBN 978-0-7506-6753-1.
[9] CRC Handbook of Chemistry and Physics, 83-th ed.; s. 12–204; CRC Press LLC: Boca Raton, 2003.
Administratorem danych osobowych jest Media Pakiet Sp. z o.o. z siedzibą w Białymstoku, adres: 15-617 Białystok ul. Nowosielska 50, @: biuro@elektroonline.pl. W Polityce Prywatności Administrator informuje o celu, okresie i podstawach prawnych przetwarzania danych osobowych, a także o prawach jakie przysługują osobom, których przetwarzane dane osobowe dotyczą, podmiotom którym Administrator może powierzyć do przetwarzania dane osobowe, oraz o zasadach zautomatyzowanego przetwarzania danych osobowych.










 ARTYKUŁY
ARTYKUŁY 



=0 oraz duT/dT (t2)=0")







 oraz C = 0,42 μF, Ud = 40 V; fs = 485 kHz")
 oraz Ud = 40 V; fs = 361 kHz")
 oraz Ud = 40 V; fs = 222 kHz")





















