|
|
 |

|

|

|
Energetyka, Automatyka przemysłowa, Elektrotechnika






|
|
|
|
|
|
|


Przedstawiam wam projekt który pomimo swego dziecinnego zastosowania daje bardzo dużo zabawy:) bo chyba w każdym z nas drzemię jeszcze gdzieś dziecko:]
Cześć wszystkim
Historia skonstruowania przeze mnie tego pojazdu była dosyć długa. O ile mi wiadomo nie wiedziałem jeszcze w necie takiego samego projektu:] Zaczęło się na początku grudnia, kiedy to miałem już całą idee na sterowanie i pomysł,
ale brakowało jeszcze porządnej konstrukcji samochodu. Początkowo pojazd skonstrułowałem z dwóch silników krokowych zamocowanych na obudowie czytnika CD :] Wyglądało zabójczo, działał hmmm nie do końca tak jak bym chciał. Coś mi mówiło ,że to jednak nie to.
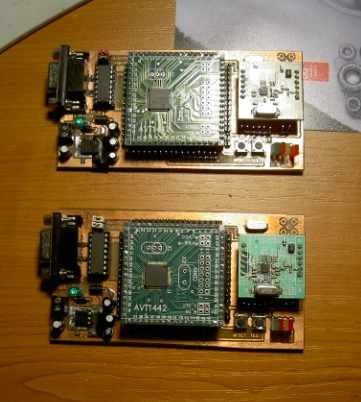
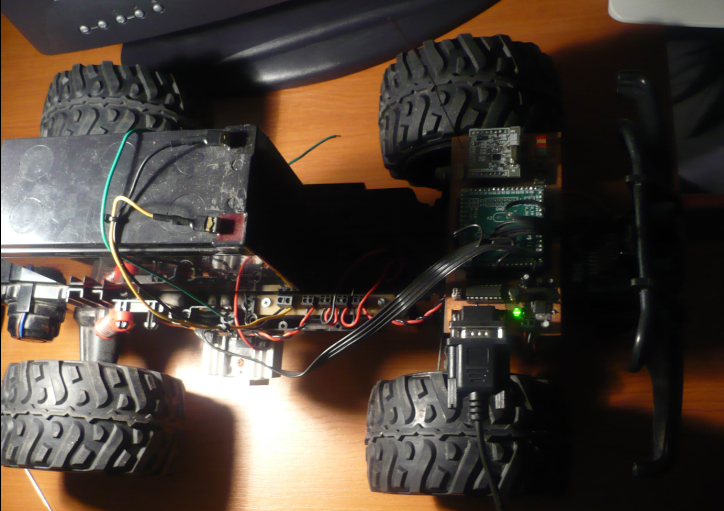
Pewnego razu udało mi się zdobyć konstrukcję (zawieszenie) tego samochodu który widzicie niżej, najśmieszniejsze jest to że na wysypisku;) tak tak , trafiłem tam sam aby pozbyć się śmieci a znalazłem super sprzęt. Samochód był w stanie dobrym ,silniki działały ,jedynie elektronika/baterie i obudowa były wymontowane. Dorobiłem do tego moduły, sterowanie na mostkach H/ moduły komunikacyjne / itd.. wszystko co widzicie na zdjęciu niżej.
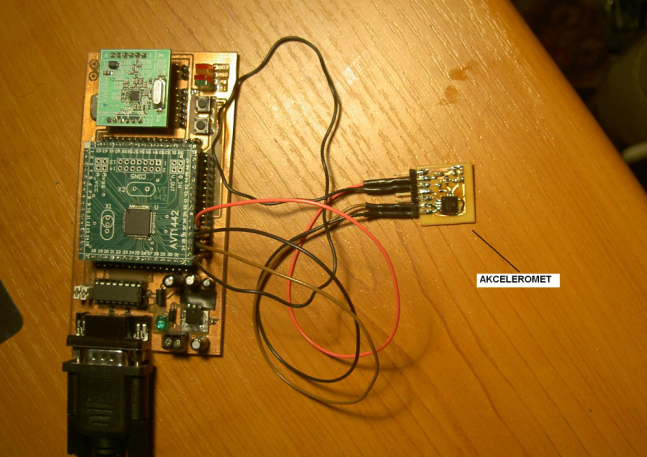
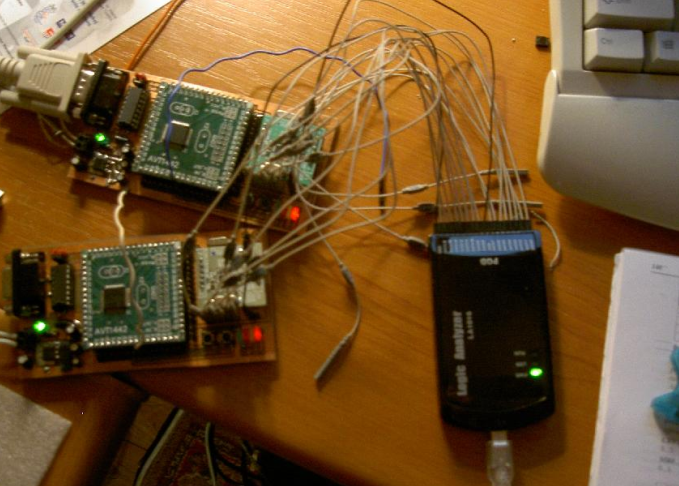
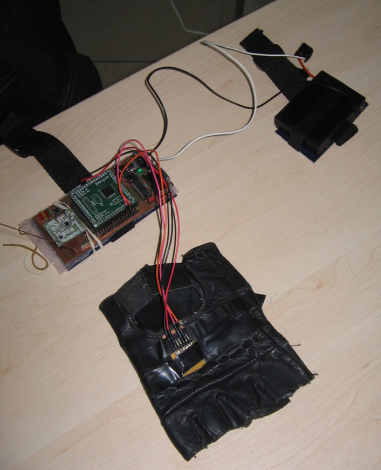
Do sterowania pojazdem (przód/tył/skręt) użyłem akcelerometru MMA7260 Freescale, umieszczonego na rękawicy :] Jest to układ analogowy, napięcie z jego wyjścia podaję na przetwornik A/D procesora LPC2146. Użyłem do tego dwóch osi XY , pierwsza podaje mi sterowanie przód/tył ( dodam że mam tutaj sterowanie PWM’em) druga to skręt. Przykładowo pochylenie dłoni/rękawicy do dołu – pojazd jedzie:) , analogicznie tył, skręcanie na boki itd….
Aby nie przesyłać wartości 10bitowej z przetwornika , przy pomocy pętli if/switch stworzyłem własny system binarny mówiący o położeniu rękawicy. Przesyłam go przy pomocy CC1100 (433MHz, anteny na 1/4fali)obsługiwanego programowo. Po drugiej stornie (samochodu) , zainstalowany jest kolejny moduł CC1100 + LPC2146. Dekoduje on informacje bitową i wysterowuje swoje wyjścia do pracy mostków H ( skręty/jazda przód-tył). Projekt można było zobaczyć kilku krotnie na Politechnice Białostockiej, podczas dni wydziału elektrycznego. Udało mi się go nawet zabrać na Dzień Robota Politechniki Gdańskiej -29.05.2008 (pozdrawiam kolegów z Politechniki Gdańsk:] ).
Dzięki za chwilę uwagi i zapraszam do oglądania.

| REKLAMA |
|
|

| REKLAMA |
|
|
| REKLAMA |
| REKLAMA |
| REKLAMA |
|
|
 |
POMOC elektroonline.pl Masz problem z jakąś funkcjonalnością portalu, nie możesz dodać zdjecia video?? pisz pomożemy!! |
|
 |
Matematyka Grupa dla wszystkich miłośników "Matki wszystkich nauk" Dyskusje, cyferki, zdania - jednym ... |
|
 |
Inteligentny dom Celem grupy są tematy związane z systemami Inteligentnego Domu. Poruszane są tu tematy o produktach i ... |
|
 |
Fotografia cyfrowa Grupa dedykowana pasjonatom i amatorom fotografii cyfrowej. Rozmawiamy o sprzęcie fotograficznym ... |
|
| REKLAMA |
|
|









 Regulator CO v2
Regulator CO v2
dopiuero teraz mam okazję go zobaczyć
Pozdrawiam